此范例程式说明如何透过 Win32 应用程式使用 KINGSTAR 子系统及介绍 API 函式。在此范例中,Win32 指的是 Windows API,而非 32 位元,KINGSTAR Win32 API 与 KINGSTAR RT API 相同,使用 Win32 介面时,不需了解 RTX64 和即时开发,因开启与停止子系统将会自动开启和停止即时环境。
因即时和非即时之间的连接为异步的,且 Windows 非即时环境,所有对子系统的呼叫都将伫列, 因此应用程式无法有非常短 (<5 ms) 的更新周期,若想要更快的更新周期,请考虑使用 RT 介面代替。
编译及执行范例程式
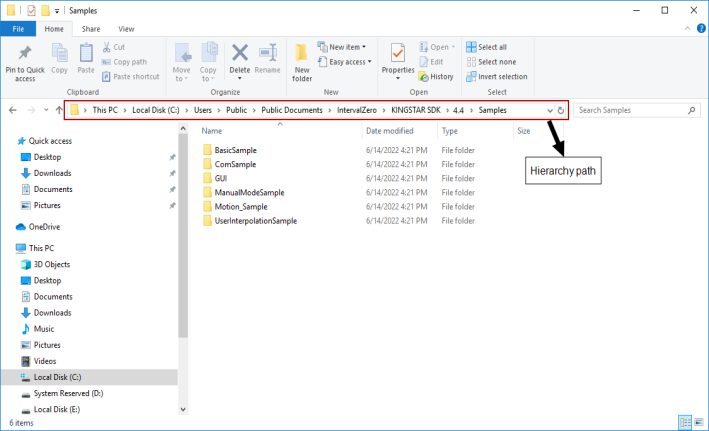
范例档案位于 C:\Users\Public\Public Documents\IntervalZero\KINGSTAR SDK\<Version Number>\Samples\Motion_Sample,打开 Motion_Sample.sln 并编译之。
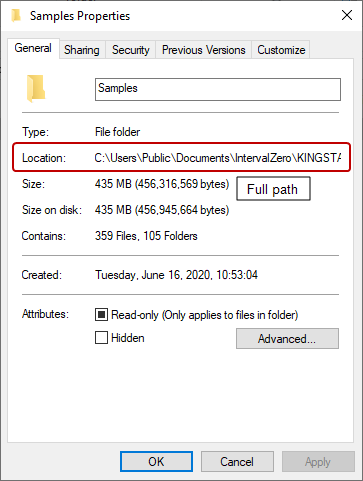
注意:档案总管 (File Explorer) 有两个路径:阶层路径与完整路径,阶层路径显示在地址栏中;完整路径显示在档案总管上方。右键点击 Motion_Sample.sln 后点选 Properties,将可看见位置 (Location) 为 C:\Users\Public\Documents\IntervalZero\KINGSTAR SDK\<Version Number>\Samples\Motion_Sample,此即为完整路径;而注意阶层路径为 Public Documents。若使用非英文的 Windows 系统,而需要复制贴上路径至地址栏中以加快查找范例速度,则请务必使用完整路径;若想要透过点击浏览范例档案夹,则请使用阶层路径;英文版 Windows 之档案夹将自动重新导向,因此就算贴上阶层路径,档案总管亦可引导至范例程式。
|
|
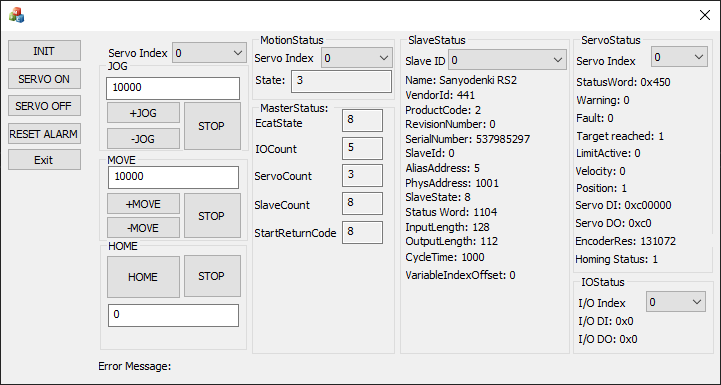
下图为范例程式的输出:
在 Visual Studio 中设定专案 properties
此范例为使用 Visual Studio 2019 中的 C++ 与 MFC 64 位元所开发之 MFC 应用程式,开发应用程式时,只要此应用程式为 64 位元,即可自行选择开发环境,因控制即时子系统需使用 64 位元。更多关于 Motion 范例的使用者介面之资讯,请见其 使用者介面。
创建应用程式时需在 Visual Studio 内修改以下属性:
- 在 Solution Explorer 中的专案名称上点击右键,接著点选 Properties。
- 进入 (Project name) Property Pages 对话框中的左窗格,点开 C/C++ 清单并点选 General。
- 在右方区域的 Additional Include Directories 方框输入 "
$(RTX64SDKDir4)include;$(KINGSTARSDKDir4)include;%(AdditionalIncludeDirectories)" (无空白鉴)。 - 在左窗格中点开 Linker 清单后点选 General。
- 右侧 Additional Library Directories 方框中,输入"
$(KINGSTARSDKDir4)lib\amd64\;%(AdditionalLibraryDirectories)"(无空白键)。 - 在左窗格中的 Linker 清单中,点选 Input。
- 在右方区域的 Additional Dependencies 方框输入 "
KsApi.lib;%(AdditionalDependencies)" (无空白鉴)。 - 点击 Apply 后再按一下 OK。
- 在专案的标头档(名称为
ProjectName.h)之 #endif // UNDER_RTSS 底下,输入以下代码:
#include <ksapi.h>
#include <ksmotion.h>

配置 KINGSTAR 子系统
使用 OnBnClickedInit 函式以开启 KINGSTAR 子系统,此函式在点击 Main menu 区域的 Init 时呼叫,其透过 GetSafeHwnd 函式(启动 window 的控制代码)获取参数 m_hWnd,之后将使用 _beginthread 函式建立一个新的执行绪,该执行绪为 InitThread 位址发送处,此 InitThread 函式负责所有初始化 KINGSTAR 子系统的工作,包括设定参数、功能、轴与 I/O 模组及连结。
范例使用的以下变数,其皆在 Motion_TestDlg.cpp 的开始即宣告。
KsCommandStatus Command = { 0 }– KsCommandStatus 为包含函式状态的结构,可得知函式是否正在执行、完成、回传任何错误及何错误,我们使用Command以获取函式状态。KsError Code = errNoError– KsError 为包含 KINGSTAR 所有错误码的列举类型,errNoError表示函式已成功。我们使用Code以接收函式的回传值,errNoError表示函式已成功执行;若Code非errNoError,则将呼叫 Destroy 而 KINGSTAR 子系统将终止。- 旗标:通知程式条件已达到。
LinkInit– 讯号表示 EtherCAT 连结是否已建立。LinkStart– 讯号表示 KINGSTAR 子系统是否已开启。BThreadFlag– 讯号表示 KINGSTAR 处理序是否开始。BCloseFlag– 讯号表示 KINGSTAR 处理序是否已被终结。Edit_Flag– 讯号表示文字方块中的值已变更。UIInit_Flag– 讯号表示在 EtherCAT 状态设为 Op 后,使用者介面使否准备好初始化。
初始化 KINGSTAR 子系统之连结
首先呼叫 Create,准备连接应用程式至 KINGSTAR 子系统,开始任何动作前,必须最先呼叫 Create。
Code = ::Create(0, 0);
if (Code != errNoError) {
Str_Error.Format(_T("Failed to Create EtherCAT: %d\n"), Command.ErrorId);
::PostMessageA(hWnd, WM_UPDATE_ERROR, 0, 0);
return;
}
BThreadFlag = true;设定 EtherCAT 循环时间
SetCycleTime设定 EtherCAT 循环时间,其时间单位为秒。欲使用低于 1 毫秒的循环时间,须备有高速计时器套件。注意非所有轴皆支援快速循环时间,若选择了不支援的循环时间,则每个轴的更新时间会自动且各自延长,欲使用快速循环时间,请确保电脑上的网卡可使用,只有具有低延迟的网卡才可支持快速循环。
Code = ::SetCycleTime(cycle1000);
if (Code != errNoError) {
Str_Error.Format(_T("Failed to set SetCycleTime: %d\n"), Command.ErrorId);
::PostMessageA(hWnd, WM_UPDATE_ERROR, 0, 0);
::Destroy();
return;
}停用 RTX64 伺服主控台 (Server Console) 上的记录
EnableServerLog启用或停用 RTX64 Server Console 上的即时讯息,若将其停用,则主控台将只显示 KINGSTAR 讯息,因此我们选择将其启用。
Code = ::EnableServerLog(true);
if (Code != errNoError) {
Str_Error.Format(_T("Failed to EnableServerLog: %d\n"), Command.ErrorId);
::PostMessageA(hWnd, WM_UPDATE_ERROR, 0, 0);
::Destroy();
return;
}设定存取模式
SetAxisAccessMode设定 EtherCAT 驱动器之资料传送模式,存取模式决定驱动器可用的控制模式,存取模式可在 KsAccessMode 列举类型中选择,预设之存取模式为 accessVelPos,
Code = ::SetAxisAccessMode(accessVelPos);
if (Code != errNoError) {
Str_Error.Format(_T("Failed to SetAxisAccessMode: %d\n"), Command.ErrorId);
::PostMessageA(hWnd, WM_UPDATE_ERROR, 0, 0);
::Destroy();
return;
}启用轴的数位输入及输出
EnableAxisInput和 EnableAxisOutput 启用或停用存取轴的数位输出及输入,首三个输入位元为负超程 (Overtravel)、正超程与原点复归感测器,若输入启用后可使用超程位元。
Code = ::EnableAxisInput(TRUE);
if (Code != errNoError) {
Str_Error.Format(_T("Failed to EnableAxisInput: %d\n"), Command.ErrorId);
::PostMessageA(hWnd, WM_UPDATE_ERROR, 0, 0);
::Destroy();
return;
}Code = ::EnableAxisOutput(TRUE);
if (Code != errNoError) {
Str_Error.Format(_T("Failed to EnableAxisOutput: %d\n"), Command.ErrorId);
::PostMessageA(hWnd, WM_UPDATE_ERROR, 0, 0);
::Destroy();
return;
}设定模拟轴的数量
SetConfiguredAxesCount设定模拟轴的数量,我们将数量设为一,若没有真实轴,将为 EtherCAT 网路建立一个模拟轴。
::SetConfiguredAxesCount(1);启用实际速度
EnableActualVelocity读取轴的实际速度。
::EnableActualVelocity(true);Motion 参数、单位转换及模拟 I/O 模组
在将范例连接到 KINGSTAR 子系统之前,我们使用以下函式来设定轴和 I/O 模组的运动参数和转换比率。
SetAxisMotionProfile:设定轴的运动轨迹。在此范例中,运动轨迹定义在 McProfileSettings 结构之 ProfileSettings 的实例中。
SetAxisCountsPerUnit:将使用者自定义位置单位的转换比率设定为轴使用的计数(脉冲)单位。在此范例中,Numerator 和 Denominator 为一,因此比率为 1:1,Reverse 为 false,因此轴的方向未倒转。
EnableAxisUnitConversion:启用轴使用真实世界单位。使用 SetAxisCountsPerUnit 设定转换比率后,需使用此函式来起动转换,此比率才会生效。
ConfigureIo:配置模拟 I/O 模组之设定。
SubsystemStatus:此结构用以获取 EtherCAT 连结的状态。我们宣告 SubsystemStatus KSMStatus 之实例,并使用 AxesCount 栏位获取 EtherCAT 网路上轴的数量。
SlaveStatus:此结构用来配置模拟 I/O 模组之设定。InputLength 与 OutputLength 为必填栏位,其决定了模拟 I/O 模组之输入及输出数量,其他于 SlaveStatus 中的栏位可留空,将会由预设值填入;若使用真实 I/O 模组,KINGSTAR 将自动侦测其输入与输出并填入所有栏位,我们宣告 SlaveStatus IoModuleStatus 之实例,以配置设定。
//Set up axes.
for (int i = 0; i < KSMStatus.AxesCount; i++)
{
::SetAxisMotionProfile(i, profileUnitPerSecond, ProfileSettings);
::SetAxisCountsPerUnit(i, Numerator, Denominator, Reverse);
::EnableAxisUnitConversion(i, TRUE);
}
//Set up I/O modules.
for (int i = 0; i < IOCOUNT; i++)
{
SlaveStatus IoModuleStatus = { 0 };
IoModuleStatus.InputLength = 16;
IoModuleStatus.OutputLength = 16;
::ConfigureIo(i, IoModuleStatus);
}开启 KINGSTAR 子系统
我们使用 Start 来开启 KINGSTAR 子系统和 EtherCAT 网路,当子系统无法启动造成程序永远在等待完成,我们为 Start 使用 WaitForCommand 将超时设置为 30 秒;若子系统开启,旗标 LinkInit 及 LinkStart 将设为 true;若 KINGSTAR 子系统无法启动,Start 将中止而 LinkInit 将设为 false。
在所有配置完成且 KINGSTAR 子系统开启后,UIInit_Flag 将设为 true。
Command = WaitForCommand(30, TRUE,::Start());
if (Command.Done)
{
LinkInit = LinkStart = true;
}
else
{
Str_Error.Format(_T("Failed to Start: %d\n"), Command.ErrorId);
::PostMessageA(hWnd, WM_UPDATE_ERROR, 0, 0);
LinkInit = false;
return;
}
UIInit_Flag = true;使用 KINGSTAR 子系统。
将真实装置连接到 KINGSTAR 子系统后,几个区域会显示装置的信息:MotionStatus、MasterStatus、SlaveStatus、ServoStatus、IOStatus,资讯将会依装置有所不同,可使用 Slave ID 以选择想要的装置,若无真实装置,则这些区域的大多数栏位将会是零。
轴
OnBnClickedServoOn 和 OnBnClickedServoOff 函式各别启用和停用轴。
Servo on
启用轴之前须检查一些状态,第一个为 EtherCAT 连接状态,若状态为 ecatOP,检查 EtherCAT 连结旗标 LinkStart,若为 true 则准备启用轴,启用之前使用 ResetAxis 来重置警报以防其中有错误,接著检查 SERVOCOUNT,若其大于零,则检查轴的 StatusWord 物件,第三位元(位元 2)应为 "操作启用 (operation enabled)",若此位元为 true 则轴已启用。欲知第三位元是否为 true,使用位元 AND 运算子 (&),条件 "if (ServoNoFlag(KSStatusWord[i]) != 1)" 如下描述:
- 对选定轴的值和十六进制值 0x4 执行逻辑 AND 运算。
- 取 AND 运算的结果并将值的位元向右移动两个位置。
- 移动位元后,检查其是否等于一 (1),若不是一,请执行以下代码。
若结果不等于一,代表轴未启动,因此我们使用 PowerAxis 来启动轴,在 PowerAxis 中,启动 (Enable) 参数为 TRUE。
void CMotion_TestDlg::OnBnClickedServoOn()
{
if(KSMStatus.State == ecatOP)
{
if(LinkStart)
{
for(int i=0; i < KSMStatus.AxesCount; i++)
{
::ResetAxis(i);
#if SERVOCOUNT > 0
if (ServoNoFlag(KSStatusWord[i]) != 1)
{
::PowerAxis(i, TRUE, TRUE, TRUE);
}
#endif
}
}
}
else
{
MessageBox(_T("KSMStatus->EcatState != ecatOP"));
}
}Servo off
欲停用轴,使用 PowerAxis,Enable 为 FALSE。
void CMotion_TestDlg::OnBnClickedServoOff()
{
for (int i = 0; i < KSMStatus.AxesCount; i++)
::PowerAxis(i, FALSE, TRUE, TRUE);
}重设警报
OnBnClickedResetalarm 函式重设警报,轴执行时可能会有错误发生,当错误发生时警报即出现,因此我们使用 ResetAxis 来重设轴的警报。
void CMotion_TestDlg::OnBnClickedResetalarm()
{
for (int i = 0; i < KSMStatus.AxesCount; i++)
{
::ResetAxis(i);
}
}Motion 控制
Jog 和 Move 为测试轴的基本运动,Jog 在不指定目标位置情况下测试速度;Move 在有目标位置情况下测试移动,而 Home 使轴回归原点。
寸动 (Jog)
Jog 在给定的方向使用 T 曲线加速度,变数 UJog_Pulse 储存寸动之速度,其预设值为 10000,m_AxisNumber.GetCurSel() 获取轴之索引,JogAxis 执行寸动运动,移动方向可为向前或向后,+JOG 使用函式 OnBnClickedPjog 以向前移动;而 -JOG 使用 OnBnClickedNjog 以向后移动。
void CMotion_TestDlg::OnBnClickedPjog()
{
::JogAxis(m_AxisNumber.GetCurSel(), double(UJog_Pulse), 36000, 36000, 360000, mcPositiveDirection);
}
void CMotion_TestDlg::OnBnClickedNjog()
{
::JogAxis(m_AxisNumber.GetCurSel(), double(UJog_Pulse), 36000, 36000, 360000, mcNegativeDirection);
}使用 HaltAxis 以停止寸动运动。
void CMotion_TestDlg::OnBnClickedJogstop()
{
::HaltAxis(m_AxisNumber.GetCurSel(), 3600, 360000, mcAborting);
}当输入寸动速度的新值,UJog_Pulse 将更新,UpdateData 在 UI 上读取更新的速度,资料更改后,旗标 Edit_Flag 将设为 true。
void CMotion_TestDlg::OnEnChangeJogPulse()
{
Edit_Flag = false;
UpdateData(true);
Edit_Flag = true;
}移动 (Move)
Move 使用运动曲线以建立 S 曲线轨迹至目的地,与 Jog 相似,变数 UMove_Pulse 储存移动的距离,其预设值为 10000,m_AxisNumber.GetCurSel() 获取轴之索引。其中有两个 MoveAxis 函式:MoveAxisAbsolute 与 MoveAxisRelative,此范例使用 MoveAxisRelative,移动方向可为向前或向后,+MOVE 使用函式 OnBnClickedPmove 以向前移动;而 -MOVE 使用 OnBnClickedNmove 以向后移动。
void CMotion_TestDlg::OnBnClickedPmove()
{
::MoveAxisRelative(m_AxisNumber.GetCurSel(), double(UMove_Pulse), 3600, 36000, 36000, 3600000, mcAborting);
}
void CMotion_TestDlg::OnBnClickedNmove()
{
::MoveAxisRelative(m_AxisNumber.GetCurSel(), double(0-UMove_Pulse), 3600, 36000, 36000, 3600000, mcAborting);
}使用 HaltAxis 以停止移动。
void CMotion_TestDlg::OnBnClickedMovestop()
{
::HaltAxis(m_AxisNumber.GetCurSel(), 3600, 360000, mcAborting);
}当输入 MoveAxisRelative 之距离的新值,UJog_Pulse 将更新,UpdateData 在 UI 上读取更新的距离,资料更改后,旗标 Edit_Flag 将设为 true。
void CMotion_TestDlg::OnEnChangeMovePulse()
{
Edit_Flag = false;
UpdateData(true);
Edit_Flag = true;
}原点复归 (Home)
Home 将轴移动到已知位置,其中原点复归过程写在函式 OnBnClickedHome 中。欲将轴复归原点,先使用 SetAxisParameter 以设定原点复归模式,在此范例使用 mcSlaveHomingMode,其为伺服驱动器所提供的原点复归方法,接著,使用 HomeAxis 以将轴回归原点,而 m_AxisNumber.GetCurSel() 获取轴之索引。
void CMotion_TestDlg::OnBnClickedHome()
{
//There is test the slave homing.
::SetAxisParameter(m_AxisNumber.GetCurSel(), mcSlaveHomingMode, 33, mcImmediately);
Command = WaitForCommand(30, TRUE, ::HomeAxis(m_AxisNumber.GetCurSel(), 0, HomeVel,
HomeEndVel, HomeAcc, HomeDec, HomeJerk, mcPositiveDirection, homingSlave));
if (!Command.Done)
{
Str_Error.Format(_T("Failed to Home: %d\n"), Command.ErrorId);
GetDlgItem(IDC_ERROR_RETURN)->SetWindowText(Str_Error);
}
}使用 HaltAxis 以停用原点复归。
void CMotion_TestDlg::OnBnClickedHomestop()
{
::HaltAxis(m_AxisNumber.GetCurSel(), 3600, 360000, mcAborting);
}获取状态
当硬体连接时,我们可以透过某些变数和函式来检查它的状态。
索引
在此范例中宣告了五个变数来接收装置的索引:
- m_AxisNumber:轴的索引(伺服马达),其在运动控制 (Motion control) 区域中用作伺服索引 (Servo Index),请见 使用者介面。
- m_ServoNumber:轴的索引,其在伺服器状态 (ServoStatus) 区域中用作伺服索引 (Servo Index)。
- m_MotionNumber:轴的索引,其在运动状态 (MotionStatus) 区域中用作伺服索引 (Servo Index)。
- m_SlaveNumber: EtherCAT 从站的索引,其在从站状态 (SlaveStatus ) 区域中用作从站 ID (Slave ID)。
- m_IONumber: I/O 模组的索引,其在 IOStatus 区域中用作 I/O 索引 (I/O Index)。
EtherCAT 主站之状态
使用 GetStatus 以获取 EtherCAT 主站状态。
GetStatus(&KSMStatus, KSSubsystemDiagnostics);EtherCAT 从站之状态
使用 GetSlaveById 以获取 EtherCAT 从站状态。
::GetSlaveById(i, &KSSlaveStatus[i]);轴状态
使用 GetAxisMotionState 以获取轴(伺服驱动器)之运动状态。
在 SlaveStatus 与 ServoStatus 区域中,使用 GetAxisByIndex 以获取轴的资讯与编码器解析度。
在 ServoStatus 区域中,使用 ReadAxisStatusWord 以获取轴之 CANopen (CiA 402) 状态(从 StatusWord 至 LimitActive)。
在 ServoStatus 区域中,使用函式: GetAxisVelocity, GetAxisPosition, ReadAxisInputs, ReadAxisOutputs 以获取 Velocity, Position, Servo DI, Servo DO 之状态。
在 ServoStatus 区域中,使用变数 Read_HomingStatus 以获取轴的原点复归状态 (Homing Status)。一般来说,伺服驱动器的数位输入之前三个位元(位元 0, 1, 2) 为负超程 (Negative Overtravel)、正超程 (Positive Overtravel) 及原点感测器 (Home Sensor),但位元可能因伺服驱动器而有所不同,在此范例中我们检查位元 0 或位元 1 和位元 2 是否为 TRUE (位元 1 和 2 一起检查),并将结果分配给 Read_HomingStatus。
while(BCloseFlag)
{
while (BThreadFlag)
{
::GetStatus(&KSMStatus, KSSubsystemDiagnostics);
for(int i = 0; i < KSMStatus.AxesCount; i++)
{
::GetAxisMotionState(i, MotionCXY[i].KSMcMotionState, MotionCXY[i].KSMcDirection);
::GetAxisByIndex(i, &KSAxisStatus[i], &AXIS_RESOLUTION[i], &AXIS_DI[i], &AXIS_DO[i]);
::ReadAxisStatusWord(i, &KSStatusWord[i]); //Read StatusWord
::ReadAxisActualVelocity(i, MotionCXY[i].VelocityValue); //Get Velocity status
::ReadAxisActualPosition(i, MotionCXY[i].PositionValue); //Get PositionValue status
SERVOIO_DI_ERROR[i] = ::ReadAxisInputs(i, &SERVOIO_DI[i]); //Get ServoDI
SERVOIO_DO_ERROR[i] = ::ReadAxisOutputs(i, &SERVOIO_DO[i]); //Get ServoDO
Read_HomingStatus[i] = HomingStatus(KSStatusWord[i]);
}
.........
}I/O 模组之状态
使用 ReadInputWord 和 ReadOutputWord 获取 I/O 模组状态,IO_DI 与 IO_DO 接收读取的 WORD 值。
for(int i = 0; i < KSMStatus.IOCount; i++)
{
#if IOCOUNT > 0
::ReadInputWord(i, 0, &IO_DI[i]);
::ReadOutputWord(i, 0, &IO_DO[i]);
#endif
}停止 KINGSTAR 子系统
在停止 KINGSTAR 子系统前须先停止所有轴,可用 HaltAxis 以停止轴。
KINGSTAR 子系统必须在关闭应用程式前停止,若电脑未预期关闭,所有侦测到主站遗失的 EtherCAT 从站都将被置放到安全警告状态,子系统会在下一次开启时尝试重置从站,然而有些从站在重启后可能不会正常运作,若此情况发生,请关闭、重启或重置这些从站,欲重置从站,使用 ResetAxis 函式或重启从站。
关闭连结
欲确保 KINGSTAR 子系统已停止,添加了关闭逻辑至 OnBnClickedExit 函式,首先设定旗标 BCloseFlag 和 BThreadFlag 为 false,接著使用 Stop 以停止 EtherCAT 连结和使用 Destroy 终止 KINGSTAR 子系统处理序,
void CMotion_TestDlg::OnBnClickedExit()
{
BCloseFlag = BThreadFlag = false;
::Stop();
::Destroy();
CDialogEx::OnOK();
}若有多个应用程式在使用 KINGSTAR,请记住此任一应用程式在呼叫 Destroy 函式前不可呼叫 KINGSTAR 函式。